
Группа специалистов из Шэньянского института автоматизации Китайской академии наук разработала мягкого робота в форме рыбы, способного менять режимы плавания в зависимости от условий среды.
Ключевая особенность новой разработки — интеграция систем движения, восприятия и управления в едином устройстве. Робот может сочетать четыре различных режима плавания, что выгодно отличает его от существующих аналогов.
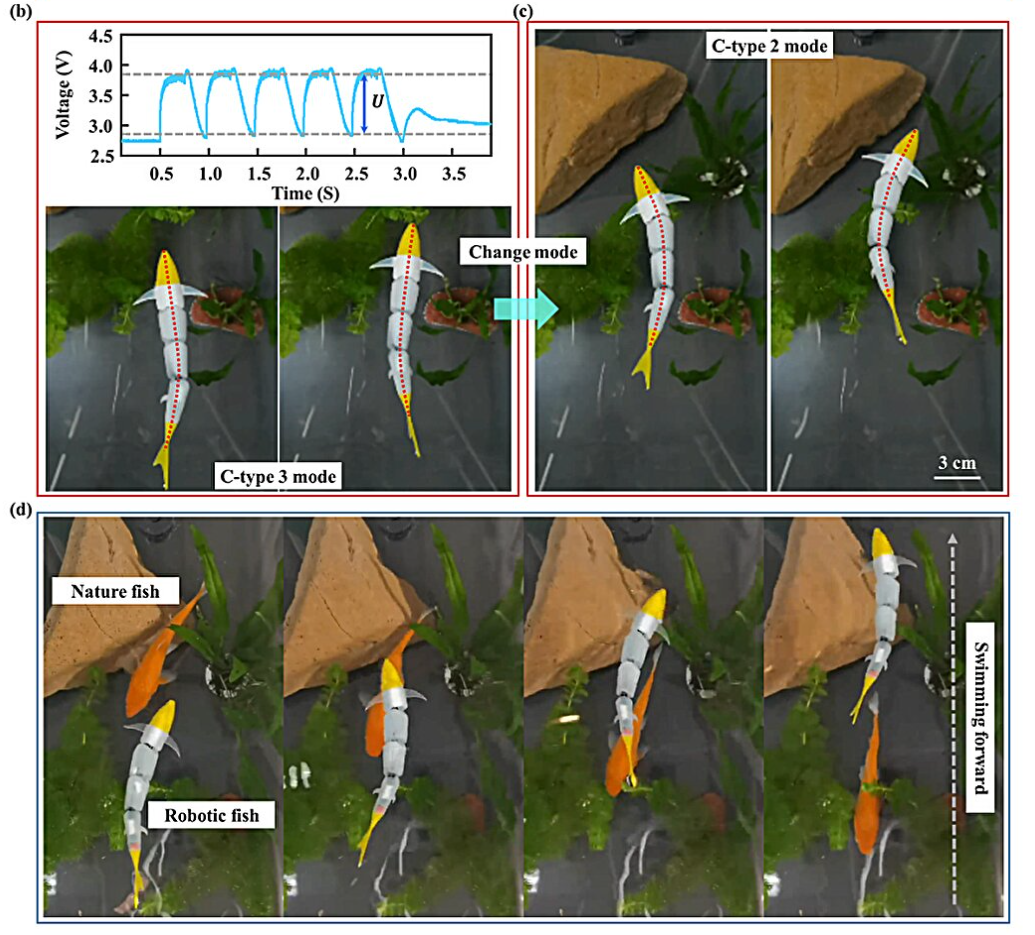
В основе конструкции лежит бионический подход. Инженеры воспроизвели структуру скумбрии, используя технологию 3D-печати для создания гибкого каркаса в сочетании с мягким приводом. Последний состоит из трёх функциональных слоёв: пружин сжатия, диэлектрических эластомерных мембран и гибких электродов.
Для восприятия изменений в окружающей среде, разработчики применили высокоточные гибкие датчики деформации. Эти сенсоры позволяют роботу определять своё положение в воде и параметры окружающей среды, что обеспечивает возможность переключения между оптимальными режимами плавания.
Синхронное управление амплитудой возбуждения и последовательностью работы нескольких бионических мышечных блоков позволяет роботу воспроизводить различные режимы плавания, характерные для живых рыб, и приспосабливаться к меняющимся условиям водной среды.
Разработка демонстрирует потенциал в области подводной робототехники и может найти применение в исследовании морских экосистем, поисково-спасательных операциях и других сферах, требующих эффективного передвижения под водой. Создание адаптивных роботов, способных имитировать движения живых организмов, открывает путь к созданию более совершенных подводных устройств для решения широкого спектра задач.
-
Большой практически бесшумный холодильник с гарантией 10 лет, интеграцией со смартфоном и ценой всего 495 долларов. Xiaomi Mijia Refrigerator Pro Dual System French Flush 508L уже в продаже

27.02.2025 16:04:00 | iXBT.com
Крошечный дрон-разведчик Black Hornet 4 получил награду Министерства Обороны США
27.02.2025 15:49:12 | TechCult.ru
Самая мощная «Нива» из серийных: Lada Niva Sport получит новый мотор мощностью 144 л.с.
27.02.2025 15:06:00 | iXBT.com
Представлен флагманский смартфон Xiaomi 15 Ultra: 200-мегапиксельная камера Leica, 6000 мАч, 90 Вт, IP68 и экран 2К
27.02.2025 14:43:00 | iXBT.com
Семейный кроссовер Chevrolet с хорошим оснащением и автоматизированной коробкой передач — 2,89 млн рублей. Chevrolet Captiva за месяц подорожал на 170 тыс. рублей
27.02.2025 14:22:00 | iXBT.com
В продаже появился новый Lada Xray Cross. Редкий экземпляр предлагают за 1,6 млн рублей
27.02.2025 14:08:00 | iXBT.com
Полный привод и независимая подвеска для бездорожья — за 850 тыс. рублей Дистрибутор Honda начинает в России продажи квадроциклов QRX
27.02.2025 13:55:00 | iXBT.com
Водитель монстр-трайка Grind Hard будет сидеть внутри огромного тракторного колеса
27.02.2025 13:48:37 | TechCult.ru
Южнокорейские инженеры создали сверхтолстый электрод для литий-ионных аккумуляторов, который увеличивает запас хода электромобилей на 14%
27.02.2025 13:28:00 | iXBT.com
204 л.с. и автоматизированная коробка передач — за 2,1 млн рублей. Кроссовер Dongfeng Aeolus Haohan продают в России по цене 122-сильной Lada Vesta
27.02.2025 13:21:00 | iXBT.com
Конкурент новейшим ChatGPT, Grok и DeepSeek. Уже в марте всем желающим предложат «лучшую ИИ-модель за всю историю» Baidu
27.02.2025 13:20:00 | iXBT.com
Эксперты в ОП обсудили судьбу иностранных ИТ-компаний после отмены санкций
27.02.2025 13:05:02 | Ведомости
Модернизированный, компьютеризированный, синтетический. Роскосмос показал новый скафандр «Орлан-МКС» №6, его называют космическим кораблем в миниатюре
27.02.2025 12:41:00 | iXBT.com
6-ступенчатая коробка передач, 12,3 с до 100 км/ч и максимальная скорость 175 км/ч. Раскрыты характеристики Lada Iskra, продажи стартуют в мае
27.02.2025 12:21:00 | iXBT.com
Новая климатическая модель Марса раскрывает тайны подповерхностной воды
27.02.2025 12:10:00 | iXBT.com
Новые российские внедорожники с корнями Toyota, УАЗы, а в перспективе Lada и «Москвичи» получат отечественные подушки безопасности
27.02.2025 11:56:00 | iXBT.com
Корональная дыра на Солнце усилила солнечный ветра до 600 км/с — он движется в сторону Земли
27.02.2025 11:47:00 | iXBT.com
Nissan Navara с 218-сильным мотором Mitsubishi, 8-ступенчатым «автоматом» ZF и полным приводом вернулся в России. Объявлены цены на Oting Palasso
27.02.2025 11:35:00 | iXBT.com
Snapdragon 8 Elite, топовая камера Leica, 6000 мА•ч, 90 Вт, спутниковая связь. Все характеристики Xiaomi 15 Ultra утекли за пару часов до анонса
27.02.2025 11:25:00 | iXBT.com
Lada Vesta почти на полмиллиона рублей дешевле, машины быстро раскупают. Цены на Vesta обвалили в Белоруссии
27.02.2025 11:11:00 | iXBT.com
«Москвич» распродает неликвид со скидкой до 567 тыс. рублей — цена «Москвича 6» 2023 года выпуска опустилась до 2,136 млн рублей
27.02.2025 11:01:00 | iXBT.com
«Мул» новейшего кроссовера Lada B+ Cross уже колесит по улицам Тольятти
27.02.2025 10:46:00 | iXBT.com
Названы реальные цены на 7-местные Lada Largus. Обычные Largus продают с большими скидками
27.02.2025 10:38:00 | iXBT.com
От «Капиталистов» до «Алисы в стране чудес»: МТС запускает студию KionFilm для создания фильмов и сериалов
27.02.2025 10:35:00 | iXBT.com
Теперь вернуться должны оба. Новые Starship и Super Heavy получили важную миссию и улучшенную авионику, старт запланирован на 3 марта
27.02.2025 10:28:00 | iXBT.com
5000 мАч, зарядка как у Galaxy S25 и One UI 7 из коробки, которой нет даже у Galaxy S24 Ultra, — за 110 долларов. Представлены Samsung Galaxy M06 5G и Galaxy M16 5G
27.02.2025 10:22:00 | iXBT.com
Космические серверы: стартап Starcloud привлёк $21 млн для создания космических дата-центров
27.02.2025 10:20:00 | iXBT.com
Будто CGI-сцена из фантастического фильма. SpaceX показала вывод на орбиту спутников Starlink
27.02.2025 10:16:00 | iXBT.com
Китайские инженеры разработали технологию впрыска гелия для создания малозаметных ракет
27.02.2025 10:08:00 | iXBT.com
Первый сигнал получен: «лунный картограф» NASA Lunar Trailblazer успешно отправился в путь
27.02.2025 09:56:00 | iXBT.com
-
Стали известны цены ремонта Galaxy Z Fold 7 — $890 за дисплей, $611 за крышку
22.07.2025 07:36:12 | ferra.ru
Что будет, если запустить игры на RTX 4080 с древним двухъядерным Athlon 4200+
22.07.2025 07:30:39 | ferra.ru
Представлен MeLE Overclock X2 — мини-ПК размером с пауэрбанк, но с SSD и до 48 ГБ оперативки
22.07.2025 07:29:12 | ferra.ru
MSI выпустит новые материнские платы Project Zero со скрытым подключением кабелей
22.07.2025 07:22:11 | ferra.ru
96-ядерный Threadripper PRO 9995WX набрал 186 800 баллов в Cinebench, но при почти 1000 Вт
22.07.2025 07:15:11 | ferra.ru
Официально: Ubisoft потратила на разработку Assassin’s Creed Shadows более €100 млн
22.07.2025 07:08:10 | ferra.ru
Игровой флагман RedMagic 11 Pro на Snapdragon 8 Elite Gen 2 получит активное охлаждение и выйдет в 2025 году
22.07.2025 07:01:10 | ferra.ru
Бумер-шутер по Fallout, новые детали Dying Light: The Beast, геймплей Warframe и Soulframe…
22.07.2025 06:00:01 | StopGame
Лучшие канбан-доски 2025: топ бесплатных и платных инструментов для управления проектами
22.07.2025 04:41:09 | Хабр
Вызов эвакуатора в два клика, поиск клиентов в Telegram-чатах «на автопилоте» — и ещё 8 российских стартапов
22.07.2025 04:40:07 | Хабр
Как BASIC вышел из тени Fortran и стал самостоятельным языком программирования?
22.07.2025 01:24:59 | Хабр
Публикация Xamarin.Forms iOS приложений в условиях прекращения поддержки фреймворка
22.07.2025 00:13:57 | Хабр
Что ждёт развитие производства микропроцессоров в России, рассказали в ИНЭУМ
21.07.2025 22:56:04 | ferra.ru
Переработанное мясо, трансжиры, сладкие напитки оказались связаны с серьёзными проблемами со здоровьем
21.07.2025 22:30:57 | ferra.ru
Около 100 организаций стали жертвами хакерской атаки на серверы Microsoft
21.07.2025 21:37:08 | ferra.ru
Жители Красногорска освоили сапборды для передвижения по затопленным улицам
21.07.2025 21:31:51 | ferra.ru
Бьюти-детокс: как разогнать лимфоток и убрать отеки с помощью косметики
21.07.2025 21:30:00 | Woman.ru
Microsoft объединила все ваши игры с Xbox и ПК в единой Windows-библиотеке
21.07.2025 21:08:44 | ferra.ru
Техническая поддержка проекта ВсеТут