
Миниатюрный робопёс Aibo, разработанный Sony, позиционирующийся как домашний компаньон, способен имитировать поведение реальных собак: ходить на четырёх лапах, откликаться на имя, играть с игрушками и даже реагировать на ласку. Однако инженеры из ETH Zurich и Sony Group Corporation пошли дальше, представив два новых алгоритма на основе обучения с подкреплением (reinforcement learning, RL), которые делают робота тише во время передвижения и наделяют его навыками выразительного танца. Результаты исследований открывают путь к более «тактичным» и артистичным домашним роботам.
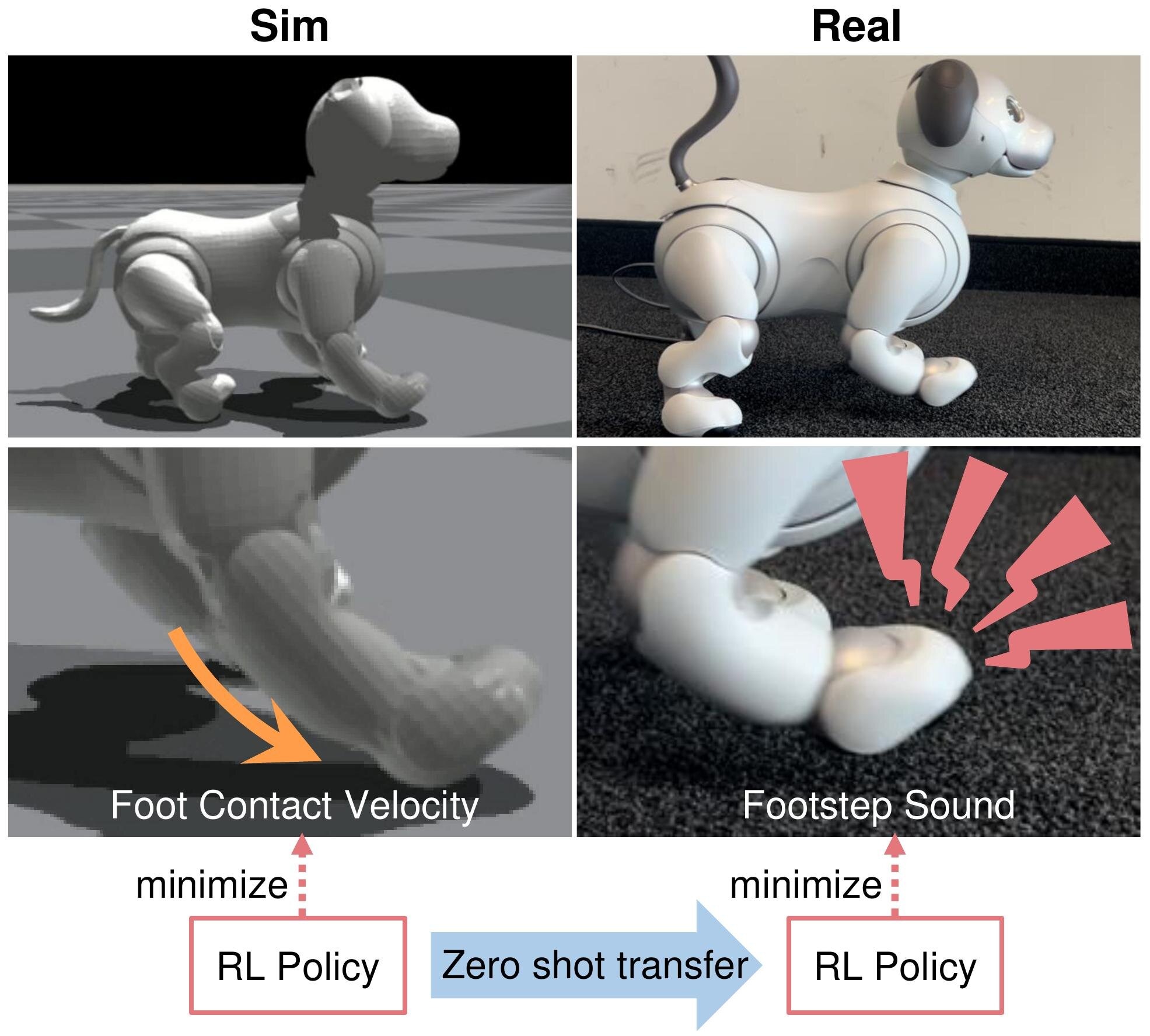
Пользователи Aibo неоднократно жаловались на шум, который робот издаёт при ходьбе. Для решения этой проблемы команда под руководством Рё Ватанабэ разработала RL-алгоритм, снижающий громкость шагов за счёт минимизации скорости контакта лап с поверхностью в физическом симуляторе.
«Мы обучили модель активно гасить колебания и увеличивать жёсткость суставов, используя данные сенсоров на лапах, а также ввели штрафы за резкие движения, создающие шум», — пояснил Ватанабэ в интервью.
В реальных экспериментах алгоритм сравнили с базовыми RL-методами и коммерческими контроллерами Sony. Оказалось, что новая система снижает уровень шума на 30% – 50%, делая передвижение Aibo практически бесшумным. «Наш подход значительно тише как стандартных решений Sony, так и традиционных RL-контроллеров», — подчеркнул исследователь.
Параллельно команда разработала модель Deep Fourier Mimic (DFM), которая сочетает RL с анализом движений для создания сложных танцевальных паттернов. «Генерация артистичных движений для развлекательных роботов обычно требует ручной работы проектировщиков и ограничивается простым воспроизведением заранее запрограммированных движений, — отметил Ватанабэ. — DFM позволяет роботу имитировать танцевальные движения, одновременно выполняя дополнительные задачи, например, перемещение в пространстве».
Тесты показали, что DFM обеспечивает плавные переходы между движениями, превращая танец Aibo в более естественный и интерактивный. Робот научился не только следовать заранее заданным паттернам, но и адаптироваться к движениям пользователя, создавая импровизированные «дуэты».
Разработанные методы могут быть внедрены в новые версии Aibo, а также адаптированы для других домашних роботов или развлекательных систем в парках аттракционов. Однако перед этим предстоит решить ключевые проблемы. Например, текущая версия алгоритма ходьбы демонстрирует компромисс между тишиной и устойчивостью: чем тише шаги, тем выше риск потери баланса. «Мы планируем интегрировать данные с камер и сенсоров, чтобы добиться одновременной тишины и надёжности», — поделился планами Ватанабэ.
-
Новый минивэн АвтоВАЗа получил примитивную конструкцию и корни из 90-х. Первый автомобиль SKM — это переименованный SRM Jinhaishi от Shineray

06.03.2025 11:42:00 | iXBT.com
NASA отключит инструмент на «Вояджере-2» в марте 2025 года для продления миссии в межзвёздном пространстве
06.03.2025 11:37:00 | iXBT.com
Apple создала настолько чудовищный чип, что в потребительском сегменте нет ничего даже близко похожего. M3 Ultra содержит 184 млрд транзисторов
06.03.2025 11:17:00 | iXBT.com
Это вина не NASA, а администрации Байдена: она была против того, чтобы застрявших на МКС астронавтов вернули ещё полгода назад
06.03.2025 11:02:00 | iXBT.com
Новые машины АвтоВАЗа — SKM — будут собирать на производстве, которое простаивало 9 лет
06.03.2025 10:55:00 | iXBT.com
В продажу поступил Mercedes-Benz S680 Guard 4Matic с 6,0-литровым V12 — неубиваемый премиальный седан за 180 млн рублей
06.03.2025 10:44:00 | iXBT.com
Цена на Nvidia GeForce RTX 5090 в России достигла 1 млн рублей, но есть варианты и подешевле
06.03.2025 10:24:00 | iXBT.com
Кнопка SOS расширяет охват: в 14 регионах России стала доступна «Помощь на дороге» через «ЭРА-ГЛОНАСС»
06.03.2025 10:11:00 | iXBT.com
Илон Маск хочет усилить отрыв Starlink от конкурентов, но власти Италии пока не разрешают компании использовать E-диапазон
06.03.2025 10:00:00 | iXBT.com
Росатом и МИФИ открыли лабораторию для выращивания сосудов из клеток пациентов
06.03.2025 09:45:00 | iXBT.com
Целая гора из Radeon RX 9070 XT, и все по рекомендованной цене. Британский ретейлер говорит о запасе более чем в 1000 таких карт
06.03.2025 09:36:00 | iXBT.com
Доступный рамный внедорожник на базе Nissan Navara стал ещё дешевле: скидка на Oting Paladin выросла до 500 тыс. рублей
06.03.2025 09:29:00 | iXBT.com
Дешёвая замена Kia Sorento и Hyundai Santa Fe. В России подешевели белорусские кроссоверы VGV U70 Pro и VGV U75 Plus 2024
06.03.2025 09:20:00 | iXBT.com
Замена Toyota Highlander, Hyundai Palisade и BMW X5. В России поменялись цены на Exeed VX
06.03.2025 09:04:00 | iXBT.com
Глаза роботов усиливают веру в их «сознание»: результаты экспериментов
06.03.2025 09:03:00 | iXBT.com
Ничего личного, просто бизнес. Apple прекращает выпуск популярных и очень свежих MacBook Air с чипами M2 и M3
06.03.2025 08:54:00 | iXBT.com
Трамп поставил на паузу торговую войну с Канадой и Мексикой: это остановило сильнейший обвал на Уолл-стрит
06.03.2025 08:42:00 | iXBT.com
Представлена новая Skoda Octavia RS: до 250 км/ч и разгон до 100 км/ч за 6,4 с
06.03.2025 08:34:00 | iXBT.com
При стыковке Starship и Super Heavy произошла поломка. Запуск отложили
06.03.2025 08:23:00 | iXBT.com
Apple наконец-то устранила одно из самых больших ограничений MacBook Air, которое не позволяло использовать три экрана одновременно
06.03.2025 08:03:00 | iXBT.com
«Самый мощный Mac в истории». Представлен Apple Mac Studio 2025 — 32 ядра CPU, 80 ядер GPU, 512 ГБ ОЗУ и 16 ТБ SSD
06.03.2025 07:56:00 | iXBT.com
Samsung выпускает One UI 7 на Galaxy Z Fold6, Z Flip6, Galaxy S23, Tab S10 и A55
06.03.2025 07:46:00 | iXBT.com
В России уже продают доступные кроссоверы Geely размером с Monjaro и запасом хода 1420 км, которые сразу же стали бестселлерами в Китае
06.03.2025 07:39:00 | iXBT.com
Управлять дронами теперь можно будет на огромном расстоянии: в России создали крошечный спутниковый модем для БПЛА
06.03.2025 07:13:00 | iXBT.com
В Татарстане начнут собирать копию Mercedes Sprinter — с российским мотором
06.03.2025 02:03:00 | iXBT.com
В России начали собирать кроссоверы Rosva Motors. Первая партия уже отправлена госзаказчикам, но что это за машины — неизвестно
06.03.2025 01:43:00 | iXBT.com
-
Тренер назвал фитнес-привычки, которые мешают наращивать мышечную массу после 40 лет

18.07.2025 17:15:09 | ferra.ru
Блеск и нищета красных дорожек: Ингеборга Дапкунайте, Нина Добрев и Александр Гудков
18.07.2025 17:00:06 | КИНО-ТЕАТР.РУ
В М.Видео-Эльдорадо рассказали, что россияне чаще всего покупают днём и ночью
18.07.2025 16:32:06 | ferra.ru
Мэделин Петш возвращается в жуткий дом в трейлере хоррора «Незнакомцы: Глава 2»
18.07.2025 16:15:06 | КИНО-ТЕАТР.РУ
ЕС ввёл санкции против ещё 22 российских банков, запретил любые операции с РФПИ и все транзакции с Беларусью
18.07.2025 15:30:49 | vc.ru
«Гранд тур»: Живите дальше в проклятом мире, который сами и создали
18.07.2025 15:30:06 | КИНО-ТЕАТР.РУ
Верховный суд Южной Кореи оправдал главу Samsung по делу о слиянии 2015 года
18.07.2025 15:00:01 | ferra.ru
В России впервые пройдет питчинг научно-фантастических фильмов и сериалов
18.07.2025 14:50:11 | КИНО-ТЕАТР.РУ
«Работаю, ныряю с аквалангом, ещё немного работаю, снова ныряю или иду в спортзал»: глава Valve Гейб Ньюэлл рассказал о жизни на яхте
18.07.2025 14:15:14 | vc.ru
Сбалансированное питание и другие полезные ежедневные привычки после 50 лет
18.07.2025 14:15:10 | ferra.ru
Томские инженеры создали первую российскую установку для закалки рельсовых колёс
18.07.2025 14:13:17 | ferra.ru
История игровой журналистики в России. Часть 2: ZX Spectrum и книжный бум
18.07.2025 14:05:18 | Хабр
Как выйти из IT?.. и пойти слесарем на завод. Моя попыточка дауншифтинга [24]
18.07.2025 13:42:39 | Хабр
Салат из свежей капусты и моркови (как в столовой), пошаговый рецепт с фото на 248 ккал
18.07.2025 13:42:00 | ГАСТРОНОМЪ
«Билайн» и «Роскосмос» объединят усилия для развития спутниковой связи
18.07.2025 13:36:14 | ferra.ru
Сильная жажда и другие признаки, что у вас слишком высокий уровень сахара в крови
18.07.2025 13:30:14 | ferra.ru
Техническая поддержка проекта ВсеТут