
Инженеры из Делфтского технического университета и Федеральной политехнической школы Лозанны разработали четвероногого робота, способного передвигаться подобно собаке, почти не тратя энергию на активное управление. Это решение может привести к созданию принципиально новых механизмов — выносливых, адаптивных и экономичных, как живые организмы.
Ключевая идея заложена в самой природе. Учёные обратили внимание, что мышцы и сухожилия животных работают как система «умных пружин», преобразуя энергию толчков и ударов в движение. Примером стал необычный эксперимент: мёртвая рыба, помещённая в поток воды, начинала изгибаться и перемещаться против течения за счёт формы и эластичности тела, без активных мышечных усилий. Точно так же новый робот PAWS обходится минимумом моторов — они включаются лишь для сложных задач, например, прыжка или подъёма по ступеням. Основную работу выполняет механика: специально рассчитанные пружины и тросы, имитирующие сухожилия, автоматически перераспределяют энергию шага.
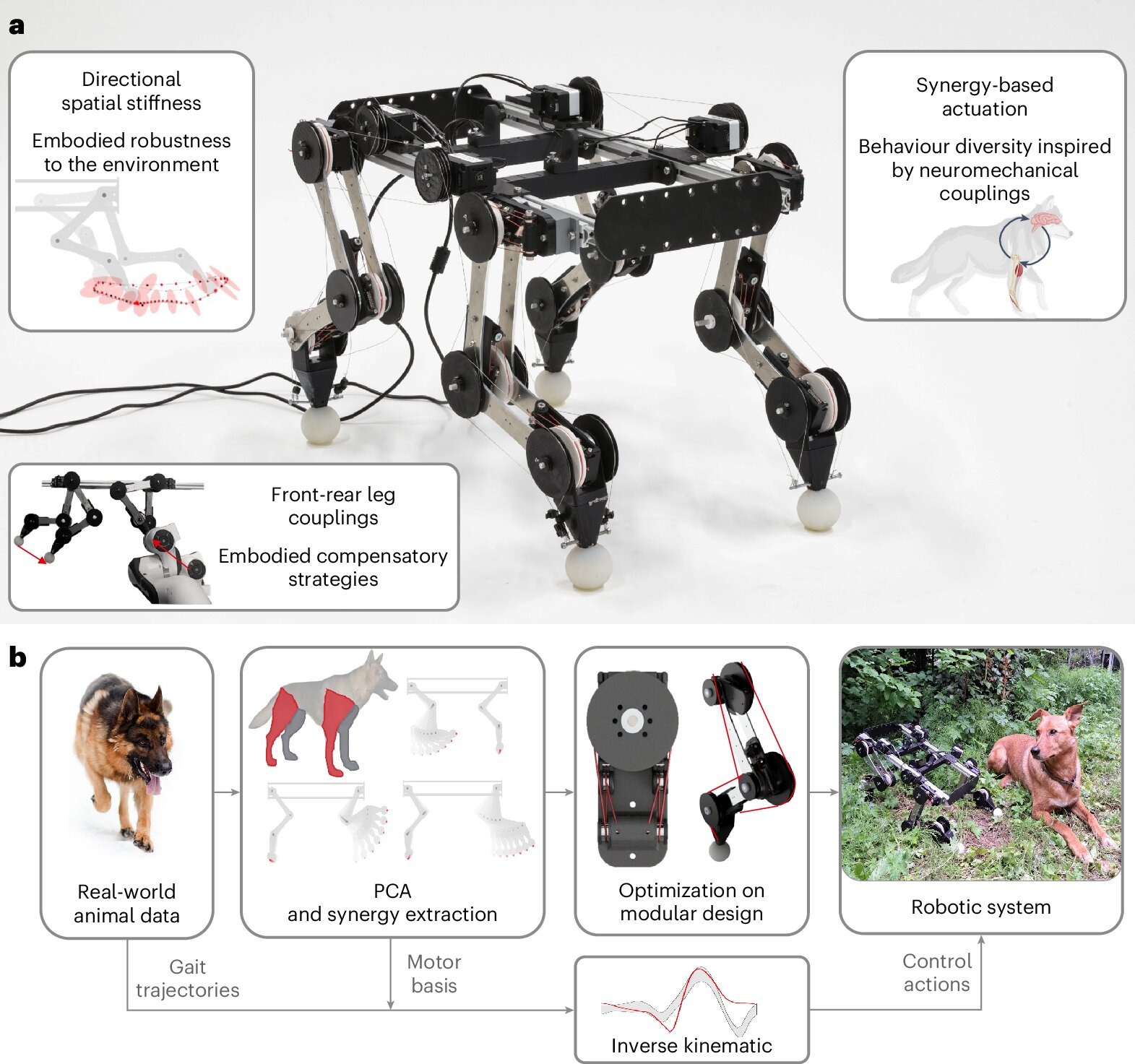
Для проектирования робота исследователи проанализировали движения собак с помощью алгоритмов машинного обучения. Это позволило выявить четыре базовых паттерна («синергии»), которые мозг животного использует для координации конечностей. В PAWS они реализованы через систему тросов, связывающих лапы — как если бы передние и задние конечности управлялись единой механической «нервной системой». Например, при толчке с одной лапы остальные автоматически подстраиваются, сохраняя равновесие.
Результат впечатляет: робот с 12 подвижными соединениями управляется всего четырьмя моторами. На беговой дорожке он демонстрирует естественный галоп, адаптируя амплитуду шага к скорости полотна. При этом робот устойчив к внешним воздействиям — после удара по корпусу он быстро восстанавливает ритм движения. Пассивная механика даже позволяет преодолевать препятствия высотой до 2 см без участия процессора.
Хотя сегодня PAWS всё ещё требует доработки, технология открывает путь к созданию роботов, которые смогут часами патрулировать территории, участвовать в спасательных операциях или работать в условиях, где частая подзарядка невозможна. «Наша цель — объединить эффективность биологических систем с функциональностью современных машин, — поясняет Козимо Делла Сантина, руководитель проекта. — Например, представить дрона-доставщика, который большую часть пути планирует за счёт механики, экономя заряд батареи».
Уже сейчас PAWS умеет не только бегать, но и садиться, наклоняться, совмещать пассивные и активные режимы. Следующим шагом станет интеграция таких систем в более крупные устройства — от автономных роботов-курьеров до промышленных платформ.
-
В России выпустили уже почти 15 тыс. кроссоверов и внедорожников Exeed, на складах дилеров скопилось много машин

29.03.2025 17:11:00 | iXBT.com
Теперь — от 2,45 млн рублей. Стильный кроссовер Chevrolet Seeker со 179-сильным мотором и автоматизированной коробкой передач подешевел в России
29.03.2025 16:54:00 | iXBT.com
Дрон впервые пролетел между регионами РФ по правилам гражданской авиации
29.03.2025 16:04:21 | Ведомости
Не просто мощно, а очень мощно: Snapdragon 8 Elite Gen 2 окажется на 40% быстрее Snapdragon 8 Elite
29.03.2025 16:00:00 | iXBT.com
Стал известен объем доработок космического корабля Crew Dragon для миссии Fram2 — уникального пилотируемого полёта на полярной низкой околоземной орбите
29.03.2025 15:51:00 | iXBT.com
Темная материя нагревает и раскручивает: астрофизики раскрыли влияние темной материи на Землю
29.03.2025 15:32:00 | iXBT.com
Держись, Toyota Alphard. Nissan готовит совершенно новый минивэн Elgrand с крутым дизайном и улучшенной гибридной силовой установкой
29.03.2025 15:23:00 | iXBT.com
Лучший минивэн для путешествий по России? У дилеров появился полноприводный «Соболь NN»: 7 мест, 2,5-литровый экономичный мотор, хорошее оснащение — 4,73 млн рублей
29.03.2025 14:45:00 | iXBT.com
Квантовый компьютер на 56-кубитном процессоре впервые сгенерировал истинную случайность для криптографии
29.03.2025 14:16:00 | iXBT.com
Ведущий российский производитель автобусов — ЛиАЗ — отказался от китайских моторов Weichai в пользу российских ЯМЗ
29.03.2025 13:48:00 | iXBT.com
Крупный дилер продает Haval Jolion со скидкой 450 тыс. рублей, хитовый кроссовер можно купить и в рассрочку
29.03.2025 13:31:00 | iXBT.com
Термоядерный реактор, работающий без остановок: Type One Energy представила проект электростанции на основе стелларатора для будущей «бесконечной» энергии
29.03.2025 12:19:00 | iXBT.com
МВД сообщило о задержании семи человек по делу о вредоносном ПО Mamont
29.03.2025 12:12:19 | Ведомости
Великобритания готовится запустить прямую сотовую связь через спутник
29.03.2025 11:55:17 | TechCult.ru
Учёные создали сверхпроводник будущего — без меди и при «высокой» температуре
29.03.2025 11:53:00 | iXBT.com
Учёные совершили прорыв в квантовых технологиях — теперь возможно полностью «прочитать» поведение запутанных частиц
29.03.2025 11:42:00 | iXBT.com
Nvidia планирует покупку стартапа Lepton AI для выхода на рынок аренды GPU-серверов
29.03.2025 11:27:00 | iXBT.com
Суд заблокировал Telegram-каналы с данными по выводу денег с «Пушкинских карт»
29.03.2025 10:17:39 | Ведомости
МТС тестирует технологию, которая обеспечит интернетом даже медведей в тайге (почти): в апреле 2025-го с ГКРЧ начинаются испытания спутникового 5G
29.03.2025 10:12:00 | iXBT.com
Intel представила Spectral JPEG XL: новый формат сжатия для изображений с десятками спектральных каналов
29.03.2025 10:09:00 | iXBT.com
Airbus заменит Россию в создании посадочной платформы для марсохода ExoMars
29.03.2025 09:53:00 | iXBT.com
NASA и Роскосмос: дружба на орбите продолжается, а Марс подождет. Агентство подтвердило сотрудничество с Россией на МКС, оставив марсианские планы на будущее
29.03.2025 09:42:00 | iXBT.com
NASA не сдаётся: Starliner снова готовится к полёту на МКС в конце 2025 года, несмотря на провал и $2 млрд убытков
29.03.2025 09:19:00 | iXBT.com
Спутники NASA зафиксировали масштабное цветение фитопланктона в Оманском заливе
29.03.2025 09:12:00 | iXBT.com
Геополитические сдвиги и конкуренция со Starlink подталкивают канадскую Telesat к ускорению проекта Lightspeed
29.03.2025 08:57:00 | iXBT.com
«Вы только вдумайтесь... сколько автомобилю лет, какой пробег и какая вероятность так сохранить автомобиль?». В продаже появился уникальный ВАЗ-2101
29.03.2025 08:56:00 | iXBT.com
«Хорошая работа, ребята», — Илон Маск похвалил себя, продав X своей же компании xAI за 33 млрд долларов
29.03.2025 08:24:00 | iXBT.com
«Я просто хотел заниматься разработкой технологий», — Маск заявил, что стал главой DOGE, поскольку западный мир оказался на развилке судьбы
29.03.2025 08:05:00 | iXBT.com
«Просто пачками везут, окраска поднапряглась и всё-таки додавила эту капризную эмаль». Lada Niva Bronto и Lada Niva Legend начали активно красить в цвете «Борнео»
29.03.2025 07:48:00 | iXBT.com
«Вспышка исключительно красивая с сильными выбросами». Солнце сильно «разошлось» и выбросило сразу несколько мощных вспышек
29.03.2025 07:38:00 | iXBT.com
Starship покоряет космос: SpaceX, как минимум, до 2032 года будет вместе с Falcon 9 и Falcon Heavy выполнять важнейшие миссии по заказу NASA
29.03.2025 07:21:00 | iXBT.com
-
Microsoft больше не будет привлекать инженеров из Китая для работы с ПО Пентагона

21.07.2025 15:45:54 | ferra.ru
Российские ученые отработают методику поиска вирусов в воде Арктики и Антарктики
21.07.2025 15:27:07 | ferra.ru
Китайская BYD пообещала покрыть все убытки, если её ИИ для автопарковки даст сбой
21.07.2025 15:00:52 | ferra.ru
По зубам можно вычислить вашу родину, вашу профессию и ваш уровень достатка
21.07.2025 13:53:48 | ferra.ru
Робот Optimus, который накладывает попкорн, автокинотеатр и зарядная станция Supercharger: пользователи соцсетей поделились впечатлениями от посещения первого ресторана Tesla
21.07.2025 13:45:16 | vc.ru
Nikon создала собственную систему литографии DSP-100 для замены круглых «вафель»
21.07.2025 13:30:50 | ferra.ru
ЦБ: с начала 2025 года в России почти в два раза выросла доля компаний, планирующих сокращения, — с 6,9% до 11,5%
21.07.2025 13:18:04 | vc.ru
Китайские венчурные фонды привлекают $2 млрд от глобальных инвесторов
21.07.2025 13:09:15 | it-world
Минтруд предложил поднять МРОТ на 2026 год с 22 440 рублей до 27 093 рублей
21.07.2025 12:07:34 | vc.ru
Вышли умные очки для плавания с дисплеем и прочными стеклами Smart Swim 2
21.07.2025 12:00:47 | ferra.ru
Как измеряли расстояние до Луны без компьютера и калькулятора? Открытия древних математиков
21.07.2025 12:00:24 | Хабр
Госдума запланировала ввести штрафы за оплату криптовалютой — от 100 тысяч до 1 млн рублей
21.07.2025 11:59:58 | vc.ru
Первое интервью изувеченной в Дубае модели: она рассказала Собчак всю правду
21.07.2025 11:53:17 | Woman.ru
СМИ рассказали о мошеннической схеме с мессенджером Max — с его помощью неизвестные пытаются взломать чужие Госуслуги
21.07.2025 11:31:40 | vc.ru
«Неукротимый»: опен-эйр-детектив с нехитрой интригой, но мощной натурой
21.07.2025 11:20:36 | Кинопоиск
Техническая поддержка проекта ВсеТут