
Исследователи из Университета Цинхуа разработали WHERE-Bot — мягкого робота без колёс, который перемещается в сложных условиях, избегая препятствий без камер или датчиков. Устройство, готовящееся к демонстрации на конференции IEEE RoboSoft в апреле, использует уникальный принцип движения за счёт выворачивания пружинного кольца.
Идея проекта родилась случайно: во время лабораторного собрания учёные экспериментировали с игрушкой Slinky — пружиной, которая шагает по ступенькам. «Соединив её концы, мы обнаружили, что пружину можно бесконечно выворачивать наружу, создавая гипнотизирующий эффект перетекания цвета, — поделился Шугуан Ли, старший автор исследования. — Это натолкнуло нас на вопрос: как подобная структура поведёт себя в разных средах — от песка до воды или труб?»
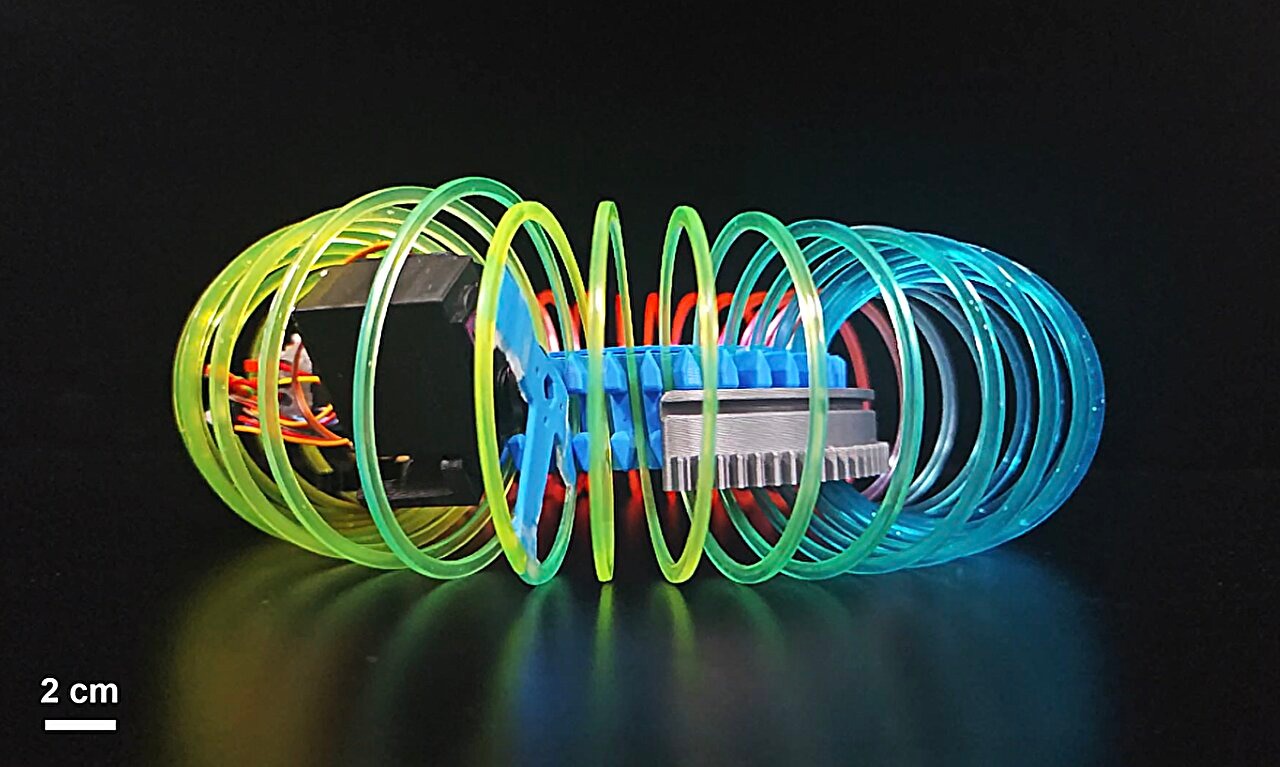
Конструкция WHERE-Bot основана на гибком кольце с винтовой структурой, закреплённом на центральном узле с мотором. При вращении кольцо выворачивается, а асимметричное распределение массы создаёт неравномерное трение о поверхность, заставляя робота двигаться по круговой траектории. «С первого взгляда кажется, будто он движется хаотично, — объяснил ведущий автор Сыюань Фэн. — Но контакт с грунтом запускает самораскручивание: более тяжёлая часть кольца “перетягивает” робота, как массивный объект на орбите».
Ключевое преимущество технологии — встроенная в механику способность к навигации. При столкновении с препятствием гибкая структура деформируется, позволяя роботу откатиться и сменить направление без алгоритмов и вычислений. «Он действует как рептилия: извивается, отталкивается от преграды и продолжает движение, — добавил Ли. — Это идеально для исследований в непредсказуемой среде — например, в пещерах или разрушенных зданиях».
Учёные видят множество приложений: от картографирования подземных полостей и инспекции трубопроводов до создания развлекательных систем — например, аттракционов с «умными» бамперами. В будущем WHERE-Bot может обзавестись пропеллерами для движения в воде, шипами для сцепления с песком или покрытием с регулируемым трением.
Однако текущий прототип ограничен материалом: пластиковое кольцо деформируется и ломается при сильных нагрузках. «Мы тестируем более прочные композиты, — отметил соавтор Дэнфэн Янь. — Также планируем добавить функциональные элементы, например, барьеры для защиты или модули для забора проб среды».
Разработка WHERE-Bot отражает тренд мягкой робототехники на бионические решения, где механика заменяет сложную электронику. По мнению авторов, их подход не только расширяет понимание движения в природе, но и открывает путь к созданию систем, которые смогут работать там, где традиционные роботы бессильны — от подземных лабиринтов до экстремальных ландшафтов других планет.
-
«Расход масла предусмотрен конструкцией двигателя». АвтоВАЗ сообщил, что расход масла двигателем «Лады» — это норма

29.03.2025 18:02:00 | iXBT.com
Новое слово в тактильных технологиях: инженеры научились «оживлять» прикосновения
29.03.2025 17:48:00 | iXBT.com
«Российская Toyota Camry» отменяется? У властей Санкт-Петербурга нет информации, когда заработает бывший российский завод Toyota
29.03.2025 17:29:00 | iXBT.com
Представлен прототип компактных ядерных батарей — углерод-14 обеспечит имплантаты и датчики энергией на тысячи лет
29.03.2025 17:28:00 | iXBT.com
Биомеханика собак помогла создать четвероногого робота с минимальным энергопотреблением
29.03.2025 17:15:00 | iXBT.com
В России выпустили уже почти 15 тыс. кроссоверов и внедорожников Exeed, на складах дилеров скопилось много машин
29.03.2025 17:11:00 | iXBT.com
Теперь — от 2,45 млн рублей. Стильный кроссовер Chevrolet Seeker со 179-сильным мотором и автоматизированной коробкой передач подешевел в России
29.03.2025 16:54:00 | iXBT.com
Дрон впервые пролетел между регионами РФ по правилам гражданской авиации
29.03.2025 16:04:21 | Ведомости
Не просто мощно, а очень мощно: Snapdragon 8 Elite Gen 2 окажется на 40% быстрее Snapdragon 8 Elite
29.03.2025 16:00:00 | iXBT.com
Стал известен объем доработок космического корабля Crew Dragon для миссии Fram2 — уникального пилотируемого полёта на полярной низкой околоземной орбите
29.03.2025 15:51:00 | iXBT.com
Темная материя нагревает и раскручивает: астрофизики раскрыли влияние темной материи на Землю
29.03.2025 15:32:00 | iXBT.com
Держись, Toyota Alphard. Nissan готовит совершенно новый минивэн Elgrand с крутым дизайном и улучшенной гибридной силовой установкой
29.03.2025 15:23:00 | iXBT.com
Лучший минивэн для путешествий по России? У дилеров появился полноприводный «Соболь NN»: 7 мест, 2,5-литровый экономичный мотор, хорошее оснащение — 4,73 млн рублей
29.03.2025 14:45:00 | iXBT.com
Квантовый компьютер на 56-кубитном процессоре впервые сгенерировал истинную случайность для криптографии
29.03.2025 14:16:00 | iXBT.com
Ведущий российский производитель автобусов — ЛиАЗ — отказался от китайских моторов Weichai в пользу российских ЯМЗ
29.03.2025 13:48:00 | iXBT.com
Крупный дилер продает Haval Jolion со скидкой 450 тыс. рублей, хитовый кроссовер можно купить и в рассрочку
29.03.2025 13:31:00 | iXBT.com
Термоядерный реактор, работающий без остановок: Type One Energy представила проект электростанции на основе стелларатора для будущей «бесконечной» энергии
29.03.2025 12:19:00 | iXBT.com
МВД сообщило о задержании семи человек по делу о вредоносном ПО Mamont
29.03.2025 12:12:19 | Ведомости
Великобритания готовится запустить прямую сотовую связь через спутник
29.03.2025 11:55:17 | TechCult.ru
Учёные создали сверхпроводник будущего — без меди и при «высокой» температуре
29.03.2025 11:53:00 | iXBT.com
Учёные совершили прорыв в квантовых технологиях — теперь возможно полностью «прочитать» поведение запутанных частиц
29.03.2025 11:42:00 | iXBT.com
Nvidia планирует покупку стартапа Lepton AI для выхода на рынок аренды GPU-серверов
29.03.2025 11:27:00 | iXBT.com
Суд заблокировал Telegram-каналы с данными по выводу денег с «Пушкинских карт»
29.03.2025 10:17:39 | Ведомости
МТС тестирует технологию, которая обеспечит интернетом даже медведей в тайге (почти): в апреле 2025-го с ГКРЧ начинаются испытания спутникового 5G
29.03.2025 10:12:00 | iXBT.com
Intel представила Spectral JPEG XL: новый формат сжатия для изображений с десятками спектральных каналов
29.03.2025 10:09:00 | iXBT.com
Airbus заменит Россию в создании посадочной платформы для марсохода ExoMars
29.03.2025 09:53:00 | iXBT.com
NASA и Роскосмос: дружба на орбите продолжается, а Марс подождет. Агентство подтвердило сотрудничество с Россией на МКС, оставив марсианские планы на будущее
29.03.2025 09:42:00 | iXBT.com
NASA не сдаётся: Starliner снова готовится к полёту на МКС в конце 2025 года, несмотря на провал и $2 млрд убытков
29.03.2025 09:19:00 | iXBT.com
Спутники NASA зафиксировали масштабное цветение фитопланктона в Оманском заливе
29.03.2025 09:12:00 | iXBT.com
Геополитические сдвиги и конкуренция со Starlink подталкивают канадскую Telesat к ускорению проекта Lightspeed
29.03.2025 08:57:00 | iXBT.com
«Вы только вдумайтесь... сколько автомобилю лет, какой пробег и какая вероятность так сохранить автомобиль?». В продаже появился уникальный ВАЗ-2101
29.03.2025 08:56:00 | iXBT.com
-
Китайская BYD пообещала покрыть все убытки, если её ИИ для автопарковки даст сбой

21.07.2025 15:00:52 | ferra.ru
По зубам можно вычислить вашу родину, вашу профессию и ваш уровень достатка
21.07.2025 13:53:48 | ferra.ru
Nikon создала собственную систему литографии DSP-100 для замены круглых «вафель»
21.07.2025 13:30:50 | ferra.ru
ЦБ: с начала 2025 года в России почти в два раза выросла доля компаний, планирующих сокращения, — с 6,9% до 11,5%
21.07.2025 13:18:04 | vc.ru
Китайские венчурные фонды привлекают $2 млрд от глобальных инвесторов
21.07.2025 13:09:15 | it-world
Минтруд предложил поднять МРОТ на 2026 год с 22 440 рублей до 27 093 рублей
21.07.2025 12:07:34 | vc.ru
Вышли умные очки для плавания с дисплеем и прочными стеклами Smart Swim 2
21.07.2025 12:00:47 | ferra.ru
Как измеряли расстояние до Луны без компьютера и калькулятора? Открытия древних математиков
21.07.2025 12:00:24 | Хабр
Госдума запланировала ввести штрафы за оплату криптовалютой — от 100 тысяч до 1 млн рублей
21.07.2025 11:59:58 | vc.ru
СМИ рассказали о мошеннической схеме с мессенджером Max — с его помощью неизвестные пытаются взломать чужие Госуслуги
21.07.2025 11:31:40 | vc.ru
Как приготовить филе рыбы в духовке: 15 простых рецептов — читать на Gastronom.ru
21.07.2025 11:03:00 | ГАСТРОНОМЪ
Хозяйку ювелирного бренда Спиридонову, обманывавшую богатых клиенток, приговорили к 7 годам колонии
21.07.2025 10:57:06 | Woman.ru
CSS-медиазапросы без min- и max-. Как работает новый синтаксис и стоит ли переходить?
21.07.2025 10:15:06 | Хабр
Когда Redis превращается в тыкву: как один DevOps провел 2 недели в аду и выжил (но какой ценой)
21.07.2025 10:15:01 | Хабр
Кортизоловый коктейль из TikTok — поможет? Вот что сказали эксперты — читать на Gastronom.ru
21.07.2025 10:01:40 | ГАСТРОНОМЪ
Техническая поддержка проекта ВсеТут