
Компания PickNik Robotics совместно с Японским агентством аэрокосмических исследований (JAXA) разработала новую систему управления грузами и оборудованием на Международной космической станции (МКС). Проект является частью инициативы JAXA по созданию роботизированной системы организации и транспортировки полезной нагрузки (PORTRS). Основная цель состояла в демонстрации сложной роботизированной системы с несколькими манипуляторами, способной выполнять различные задачи в условиях невесомости, включая перемещение грузов, замену полезной нагрузки и работу с гибкими контейнерами.
«Астронавты, многие из которых имеют учёные степени или являются опытными лётчиками, тратят время на уборку вентиляционных отверстий, очистку поверхностей и перемещение грузов при пополнении запасов», — отметил Дэв Колеман, основатель и главный технический директор PickNik. Он подчеркнул, что каждый час работы астронавта в космосе обходится примерно в $200 000, учитывая затраты на подготовку, запуск и жизнеобеспечение. Поэтому использование роботов для выполнения подобных задач имеет огромную отдачу от инвестиций. В качестве примера Колеман привёл случай, когда носок астронавта попал в вентиляционное отверстие и заблокировал его, что создало угрозу для системы жизнеобеспечения. Робот мог бы легко решить эту проблему.
В ходе последней демонстрации JAXA стремилось доказать, что система способна удовлетворять требованиям реальных космических операций, обеспечивая высокую скорость, надёжность и готовность к практическому применению. Хотя наземные и космические сценарии применения робототехники во многом схожи, многие специфические возможности космических роботов реализованы на уровне прошивки. PickNik, не участвуя в разработке прошивки, создала систему на базе MoveIt Pro, способную работать в условиях невесомости. Колеман объяснил, что наземные роботы учитывают гравитацию в своих системах управления, а переход к невесомости требует незначительных изменений в настройке управления.
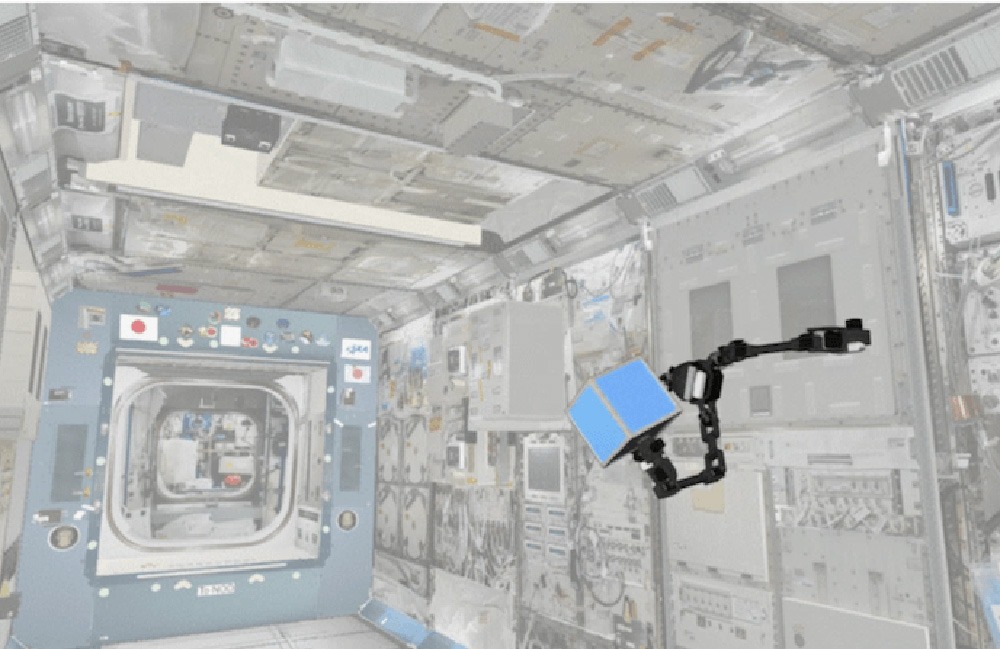
Робот JAXA имеет четыре руки и нефиксированное, перенастраиваемое основание. В невесомости робот может использовать любую поверхность для стабилизации, свободно перемещаясь по космической станции. Он может использовать любую из своих четырёх рук для стабилизации, цепляясь за направляющие, уже имеющиеся на МКС для астронавтов. Программное обеспечение, включающее обратную кинематику, должно быть динамически адаптируемым в зависимости от положения конечностей робота.
-
240-герцевый 24-дюймовый монитор дешевле 90 долларов. Представлен KTC H24F7

10.07.2025 22:00:00 | iXBT.com
1500 евро за флагман Huawei без Android. Линейка Pura 80 анонсирована глобально
10.07.2025 21:54:00 | iXBT.com
В Москве по подозрению в госизмене арестован экс-директор РАЭК Гребенников
10.07.2025 21:27:22 | Ведомости
Учёные Джонса Хопкинса создали робота, самостоятельно удалившего желчный пузырь на симуляторе
10.07.2025 21:15:00 | iXBT.com
Китайская «Чанъэ-6» предоставила новые данные об астероидном ударе, изменившем лунную мантию 4 миллиарда лет назад
10.07.2025 21:00:00 | iXBT.com
Электрический Fiat Ducato обещает вдвое быстрее заряжаться и перевозить до 22 кубометров груза
10.07.2025 20:34:00 | iXBT.com
Новая технология переработки оливина обещает решить проблему дефицита редких металлов
10.07.2025 20:21:00 | iXBT.com
Дождались: «Москвич 8» — одноклассник Hyundai Santa Fe и Kia Sorento — поступит в продажу на следующей неделе
10.07.2025 16:50:00 | iXBT.com
Мощный американский пикап на российских просторах. В РФ привезли RAM 1500 RHO с 540-сильным дизелем Hurricane Twin Turbo и 30-сантиметровым клиренсом
10.07.2025 16:33:00 | iXBT.com
В России устроили распродажу кроссоверов Soueast от Chery: большой Soueast S09 с 2,0-литровым мотором и 8-ступенчатым «автоматом» подешевел на 450 тыс. рублей
10.07.2025 16:16:00 | iXBT.com
«ГАЗель» уже не та: «ГАЗель Next», «ГАЗель NN» и «Соболь NN» получили систему курсовой устойчивости вслед за подушками безопасности
10.07.2025 16:03:00 | iXBT.com
На ферме Dyson выращивают клубнику в гигантских роботизированных колесах
10.07.2025 15:52:48 | TechCult.ru
На ферме Dyson выращивают клубнику в гигантских роботизированных колесах
10.07.2025 15:52:48 | TechCult.ru
Самая дешевая видеокарта с 8 ГБ памяти из новой линейки Nvidia. В России начали продавать GeForce RTX 5050 — 28 тыс. рублей за поддержку DLSS 4
10.07.2025 15:38:00 | iXBT.com
Самая дешевая видеокарта с 8 ГБ памяти из новой линейки Nvidia. В России начали продавать GeForce RTX 5050 — 28 тыс. рублей за поддержку DLSS 4
10.07.2025 15:38:00 | iXBT.com
Nissan запускает производство Qashqai с расширенной электрической тягой
10.07.2025 15:23:00 | iXBT.com
Nissan запускает производство Qashqai с расширенной электрической тягой
10.07.2025 15:23:00 | iXBT.com
Samsung выпустила важное обновление для Galaxy S25 и Galaxy S24, но это не One UI 8
10.07.2025 15:21:00 | iXBT.com
Samsung выпустила важное обновление для Galaxy S25 и Galaxy S24, но это не One UI 8
10.07.2025 15:21:00 | iXBT.com
Кроссоверы Chery Tiggo 4 и Tiggo 7L подешевели в России, но доступнее не стали. Как такое возможно?
10.07.2025 14:40:00 | iXBT.com
Кроссоверы Chery Tiggo 4 и Tiggo 7L подешевели в России, но доступнее не стали. Как такое возможно?
10.07.2025 14:40:00 | iXBT.com
Кроссоверы Chery Tiggo 4 и Tiggo 7L подешевели в России, но доступнее не стали. Как такое возможно?
10.07.2025 14:40:00 | iXBT.com
Астрономы Оксфорда определили, что межзвёздная комета 3I/ATLAS прибыла из толстого диска Млечного Пути — региона звёзд возрастом свыше 10 млрд лет
10.07.2025 14:18:00 | iXBT.com
Астрономы Оксфорда определили, что межзвёздная комета 3I/ATLAS прибыла из толстого диска Млечного Пути — региона звёзд возрастом свыше 10 млрд лет
10.07.2025 14:18:00 | iXBT.com
Как хитовый Geely Coolray, только более стильный и более квадратный. Представлен дешевый кроссовер Geely Icon 2026
10.07.2025 14:04:00 | iXBT.com
Как хитовый Geely Coolray, только более стильный и более квадратный. Представлен дешевый кроссовер Geely Icon 2026
10.07.2025 14:04:00 | iXBT.com
-
«Я смирился с тем, что я неидеальный родитель»: Влад Топалов о трудностях отцовства

13.07.2025 20:17:44 | КИНО-ТЕАТР.РУ
В Москве провели уникальную операцию по удалению таза из-за рака кожи
13.07.2025 19:30:00 | ferra.ru
РБК: на середину 2025 года средняя стоимость 1 м² вторичного жилья в мегаполисах составляет около 130 тысяч рублей, но с учётом ипотечных выплат дорастёт до 640 тысяч рублей
13.07.2025 19:29:22 | vc.ru
День 1236: в первой половине 2025 года продажи тихих вин в российской рознице сократилась на 12% год к году, игристых — на 5%
13.07.2025 18:55:31 | vc.ru
Nvidia предупредила о риске атак на GPU из-за особенностей видеопамяти GDDR6
13.07.2025 18:45:00 | ferra.ru
Хоккей, обезьяна Чи-Чи-Чи и эко-отель в Дагестане: главные трейлеры за неделю
13.07.2025 18:30:04 | КИНО-ТЕАТР.РУ
Самый критикуемый цилиндрический Apple Mac Pro вошёл в число винтажных устройств
13.07.2025 18:00:00 | ferra.ru
Мошенники начали изображать из себя детских психологов, предупредили в МВД
13.07.2025 17:55:11 | ferra.ru
Федерация гонок дронов РФ будет развивать спортивные дисциплины для людей с ОВЗ
13.07.2025 17:53:06 | ferra.ru
Эксперты обсудили, как лучше продвигать российскую науку и разработки
13.07.2025 17:51:40 | ferra.ru
Jovari поделилась концептом модульной системы для «погрузки» пассажиров в самолёты, которая «сэкономила бы миллиарды долларов» аэропортам и авиакомпаниям
13.07.2025 17:48:11 | vc.ru
Jovari поделилась концептом модульной системы для посадки пассажиров в самолёты, которая «сэкономила бы миллиарды долларов» аэропортам и авиакомпаниям
13.07.2025 17:48:11 | vc.ru
Евгений Тепляков хочет сделать жену счастливее — заговорил о 10-м ребенке
13.07.2025 17:47:00 | Woman.ru
В Калининграде разработали полимеры для защиты от электромагнитного излучения
13.07.2025 17:15:00 | ferra.ru
«Я думал, у меня никогда не будет детей»: Артем Ткаченко о родительстве, бессонных ночах и безусловной любви
13.07.2025 17:00:04 | КИНО-ТЕАТР.РУ
IT-Weekly: финансирование радиоэлектроники сократят в 5 раз; МТС оштрафуют на 3 млрд рублей; OpenAI готовит браузер с ИИ
13.07.2025 16:52:51 | it-world
Разработчик комплектующих для нефтегазовой отрасли вошёл в ОЭЗ «Технополис Москва»
13.07.2025 16:30:00 | ferra.ru
Как “по-быстрому” сделанная игра затянула меня в геймдев на 20 лет и какие выводы я из этого сделал
13.07.2025 16:16:08 | Хабр
Климова в ослепительном белом, Бондарчук в летних рюшах: Action! пригласил звезд на завтрак
13.07.2025 16:06:00 | Woman.ru
Intel Core Ultra 5 245HX для ноутбуков в тестах обогнал даже настольную модель
13.07.2025 15:45:00 | ferra.ru
[Перевод] Как ваш полет домой поможет инопланетянам определить местоположение Земли
13.07.2025 15:35:27 | Хабр
Техническая поддержка проекта ВсеТут